Mobile Robots Course


The current robot.
As a requirement of the Robotics Minor, a Mobile Robots class (ROBO 302) will be offered for the first time this spring. This three-credit class includes one lab per week. According to the Registrar, the class is “an introduction to the basic principles of mobile robots, including mechanical, sensory, and cognitive systems necessary for successful operation. Topics will include hardware, locomotion, sensors, control schemes, localization, and navigation.”

A robot from a past microprocessors course about 4 years ago.
Dr. Mohr, professor of Electrical Engineering, spoke with me about what the class will look like. “We will look at how mobile robots get around, focusing mostly on wheeled robots…what kind of sensors they use to find out what their environment is like, and lastly, to map their environment and use their sensors to figure out where they are in their environment at all times.”
There will also be hands-on experience with a robot throughout the semester. There are 20 kits to build autonomous robots, and teams of two or three will work together to assemble the robot. The robots are not remote-controlled, students will learn to program the robot to run on its own. Dr. Mohr showed me an example of a robot that he has worked on and off for the past year and a half assembling. The main brain of the robot is a single board computer, called a myRio, which creates a wireless network to either a phone or laptop. The readings from the robot will then be presented on the laptop in a “software called LabVIEW which is like graphic programming, which is pretty easy to pick up. Since we have people from different programming backgrounds, that’s nice.” The entire robot is run off a lithium ion battery, the same type found in cell phones.

Another past-generation robot used about 8 years ago. The lithium battery was overcharged and then caught on fire.
The robots utilize two motor-driven wheels. Each motor has an optical encoder sensor, where pulses can be counted to tell how far the wheels have traveled. The Inertial Measurement Unit, or IMU, contains three sensors. The magnetometer measures the earth’s magnetic field, essentially working as an electronic compass. The accelerometer tells when something is moving, and the gyroscope identifies rotation. There is a GPS chip which tells the time as well as the latitude and longitude. “So, if you go around campus, you’ll be able to tell within a few meters, based on GPS where you are. So, we are going to be doing some things outside with this robot.” The lidar uses a laser light to measure the time it takes for light to bounce off the nearest object, identifying the range, which is helpful in mapping out a room. Dr. Mohr says there are plans to add cameras to the robots, but not this year. The focus this year is to get up and running with the course.
What should students expect to learn from this class? How robots “sense their environment, map their environment, and figure out the answer to the question “Where am I?” and then plan missions and carry them out.”
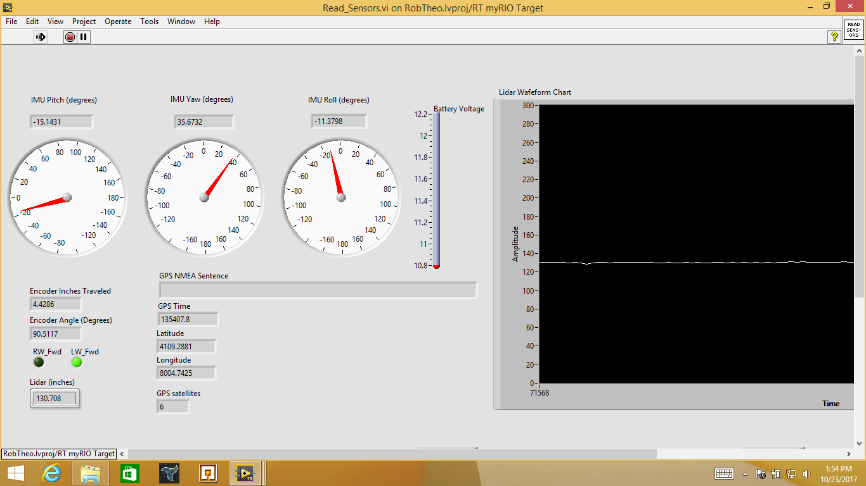
The interface of the LabVIEW software connected to the robot.