Engineering Senior Design Project: Underwater Robot

The Underwater Robot team during one of their meetings.
Every spring, seniors in the engineering department are required to showcase what they have learned through a Senior Design Project. JD Elsey, a senior Electrical Engineering major, spoke about his group’s Senior Design Project: Creating an underwater robot.
How many people are in your group?
We have five Electrical Engineering students and six Mechanical Engineering students for a total of 11 team members. We are also working with the Grove City College Robotics Club on some aspects of the design and will be working more with them on testing and feedback as we make progress.
Does each member have a specific role?
Because we are running a joint project, our team roles are somewhat complicated. The electrical and mechanical teams each have our own managerial roles, with only a couple managerial roles over the entire joint team. As far as technical roles go, we are divided into subcommittees per project piece. In other words, we have a team on the frame, a team on the motors, a team on the power system, a team on the control system, etc.
What is your project?
Our project is to design Remotely Operated Vehicle (ROV) for use in the Marine Advanced Technology Education (MATE) international competition for 2018.
https://www.marinetech.org/rov-competition-2/
What is the purpose of the project?
The purpose of the project is to produce an ROV to complete a series of three tasks set forth in the MATE 2018 competition specification. For us, this means we need to manipulate objects and interface/communicate with several electrical components underwater.
https://www.marinetech.org/missions-specs–scoring/
According to the MATE website, “the 2018 MATE competition highlights the role that ROVs play in supporting underwater archaeology, seismology, and renewable energy activities in the Pacific Northwest.”
What is the most challenging aspect of designing the project?
The most challenging aspect of our project is trying to play catch-up on the core components. We are in a position where we are going to have to redesign the entire project from the ground up. We need a solid, fully functional frame and motor system before we can focus on the more detailed aspects of the project.
How much of the project have you completed?
At this point, we have completed a preliminary frame design and we are currently underway on testing improved components of the electrical control and power systems.
What is the next step?
The next step is to complete the electrical evaluation, motor tests, and begin constructing the frame.
The members of the team and their roles include:
- Justin Hullenbaugh – MECE, thrusters, secretary
- David Fritts – EE, power distribution, editing
- Christian Fifield – MECE, thrusters
- Paige Foley – MECE, electrical housing and frame
- Laura Kroening – MECE, electrical housing and frame
- Ben Green – junior Computer Science major, president of robotics club
- Mike Bright – project advisor
- Evan Kovacs – EE, motor driver hardware and thruster interfacing
- Domenic Rodriguez – EE, control systems and software
- Ryan Krouse – EE, financial, optics and thrusters
- Danny Downward – MECE, manipulator, MECE team leader
- Ray Bromen – MECE, manipulator
- JD Elsey – EE, project lead, power distribution and surface controls
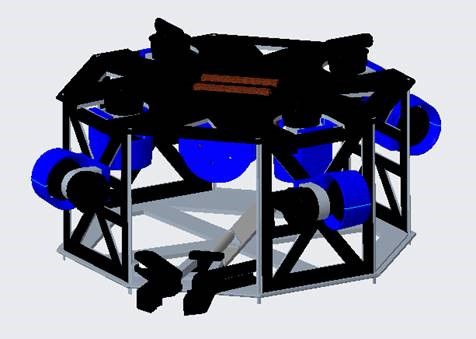
The preliminary design of the robot
I also sat in on a weekly meeting. The discussion that week involved determining what cameras and rubber to use, as well as a presentation by Christian on the thrusters. Working to stay on the budget of $3,500 is also another aspect the team must take into consideration. Good luck to the team this year, I am excited to see how the finished product turns out!